Use APKPure App
Get RTAB-Map old version APK for Android
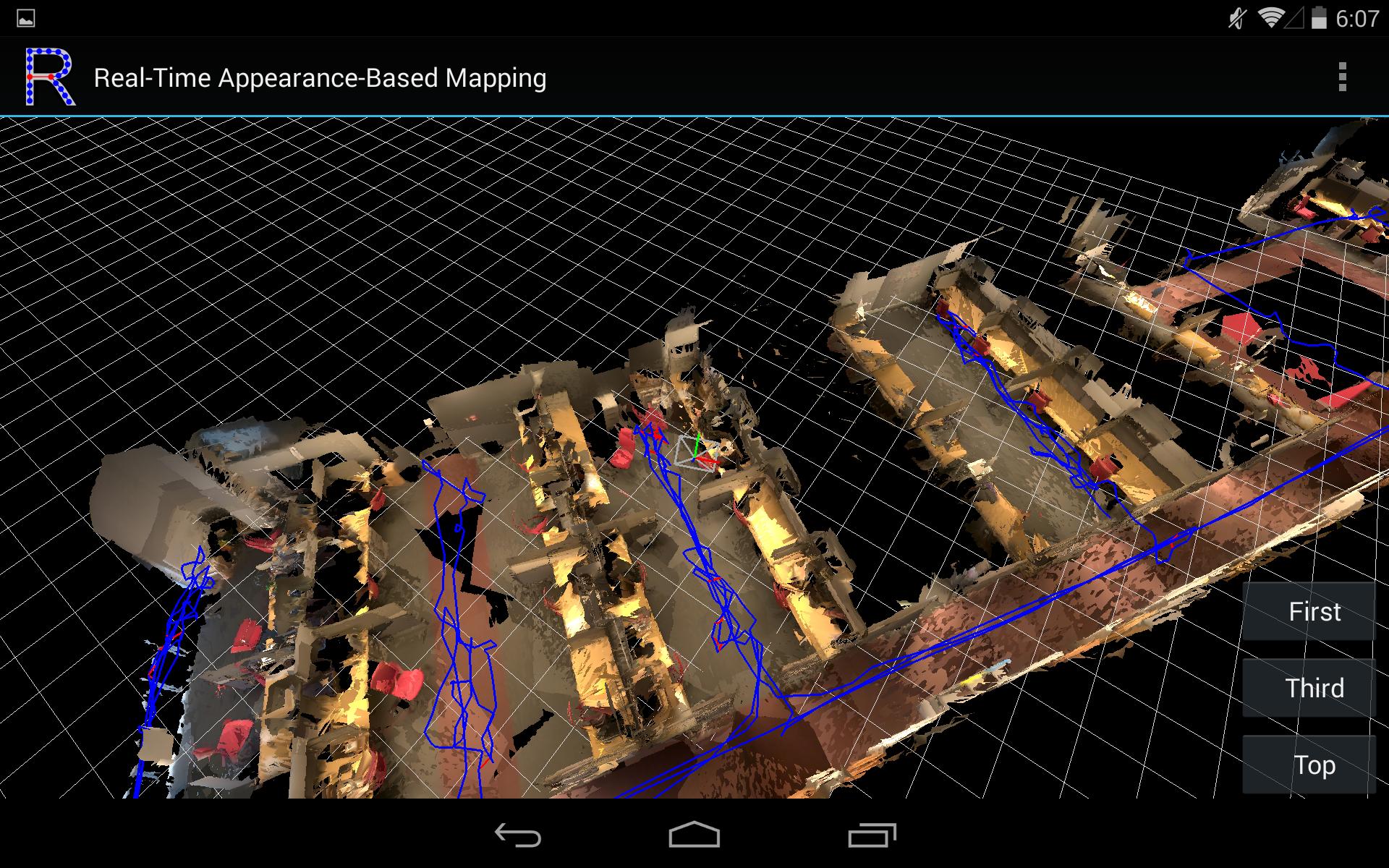
Real-Time Mapping Appearance-Based
RTAB-Map (Real-Time Appearance-Based Mapping) là một cách tiếp cận SLAM Open Source RGB-D dựa trên đồ thị dựa trên một máy dò vòng lặp đóng cửa xuất hiện dựa trên gia tăng. Máy dò vòng lặp đóng cửa sử dụng một cách tiếp cận túi-of-từ để quyết tâm như thế nào có thể là một hình ảnh mới xuất phát từ một vị trí trước hoặc một vị trí mới. Khi một giả thuyết vòng lặp đóng cửa được chấp nhận, một ràng buộc mới được thêm vào đồ thị của bản đồ, sau đó tối ưu hóa đồ thị giảm thiểu sai sót trong bản đồ. Một cách tiếp cận quản lý bộ nhớ được sử dụng để hạn chế số lượng các địa điểm được sử dụng để phát hiện vòng lặp đóng cửa và tối ưu hóa đồ thị, do đó thời gian thực khó khăn về environnements quy mô lớn luôn tôn trọng.
Mô hình của video giới thiệu trên Sketchfab đây: https://skfb.ly/6nryX
Đối với câu hỏi, hãy hỏi trên diễn đàn hoặc trên Github: http://introlab.github.io/rtabmap/#troubleshooting
*** Nó chỉ hoạt động trên Project Tango
Tính năng, đặc điểm:
* Online 3D quét / lập bản đồ môi trường
* Phát hiện trực tuyến vòng lặp đóng cửa và đồ sửa chữa
* Lưu ở định dạng DB (RTAB-Map định dạng máy tính để bàn)
* Xuất khẩu trong PLY hoặc OBJ (với kết cấu lên đến 720p)
* Mapping Multi-session (tiết kiệm và tiếp tục sau)
* Chế độ Localization chỉ (trong một phiên trước)
* Chế độ quỹ đạo nơi những đám mây điểm sẽ không được lưu (tương tự như Khu Learning)
* Tùy chọn Post-chế biến (ví dụ, sử dụng Bundle Adjustment để gắn kết cấu)
* Thêm "Settings-> Mapping-> Save GPS" tùy chọn (mặc định vô hiệu hóa) để lưu tọa độ GPS trong cơ sở dữ liệu. Thấy vấn đề # 226 trên trang của dự án cho biết thêm.
Last updated on Nov 24, 2016
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option
Phiên bản mới nhất
![]() 0.11.11
0.11.11
Được tải lên bởi
Melissa Smith
Yêu cầu Android
Android 4.2+
Danh mục
Báo cáo


Discover what you want easier, faster and safer.

RTAB-Map
0.11.11 by Mathieu Labbé
Oct 24, 2018