Use APKPure App
Get RTAB-Map old version APK for Android
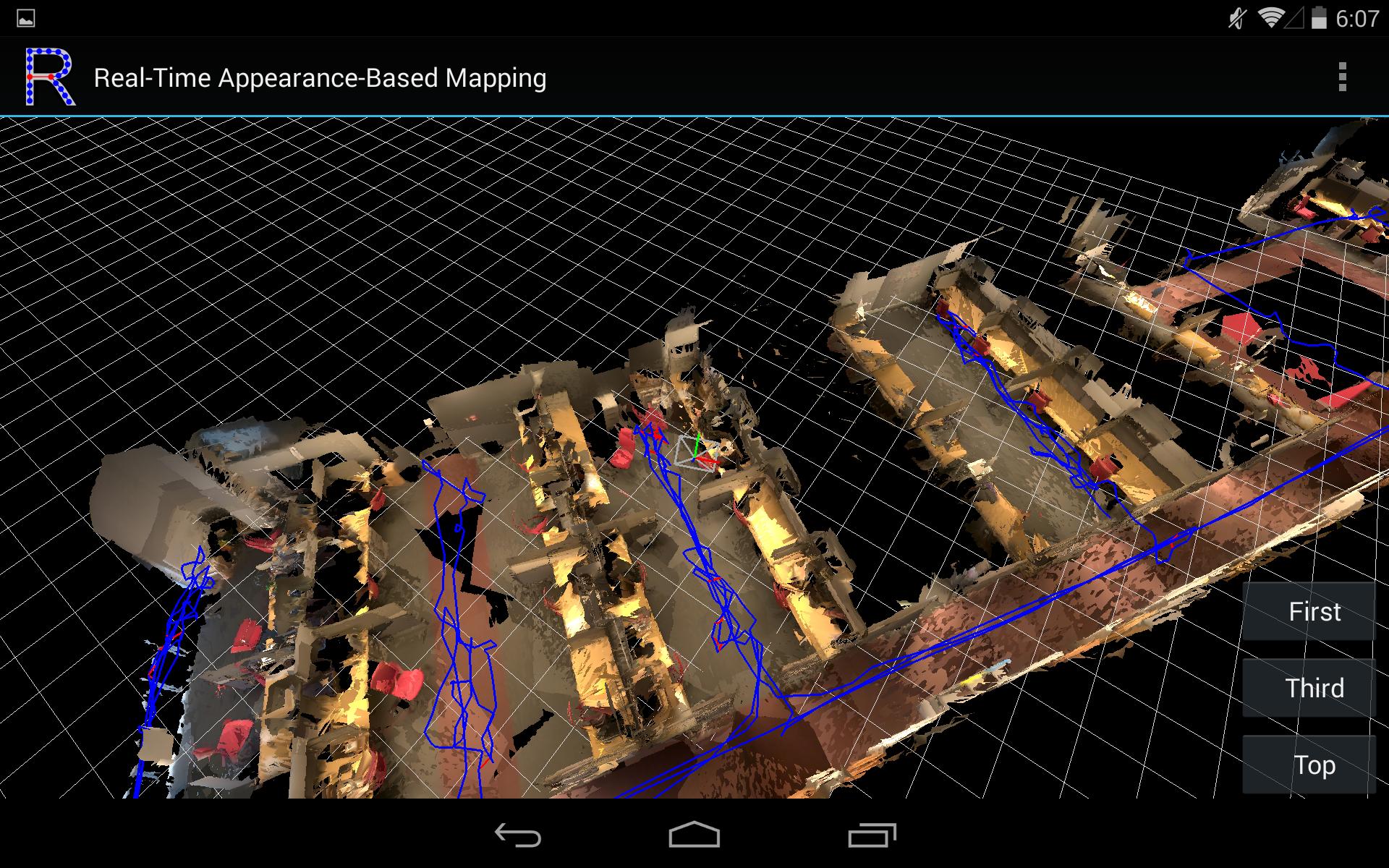
Real-Time-Appearance Based Mapping
RTAB-Map (Real-Time-Appearance Based Mapping) is een Open Source RGB-D Graph-Based SLAM aanpak gebaseerd op een incrementele-verschijning op basis lus sluiting detector. De lus sluiting detector maakt gebruik van een zak-of-words aanpak om nader te onderzoeken hoe groot de kans een nieuwe afbeelding komt uit een vorige locatie of een nieuwe locatie. Wanneer een lus sluiting hypothese wordt geaccepteerd, wordt er een nieuwe constraint toegevoegd aan de kaart van de grafiek, dan is een grafiek optimizer minimaliseert de fouten in de kaart. Een geheugen beherend benadering wordt gebruikt om het aantal nummers voor lussluiting detectie en grafiek optimalisatie te beperken, waardoor real-time beperkingen grootschalige environnements altijd worden gerespecteerd.
Model van de aanbevolen video op Sketchfab hier: https://skfb.ly/6nryX
Voor vragen, vragen op het forum of op GitHub: http://introlab.github.io/rtabmap/#troubleshooting
*** Het werkt alleen op Project Tango
Kenmerken:
* Online 3D scanning / mapping van het milieu
* Online lussluiting detectie en kaartcorrectie
* Opslaan in DB-formaat (RTAB-Map desktop formaat)
* Export in PLY of OBJ (met texturen maximaal 720p)
* Multi-sessie in kaart brengen (verder later)
* Plaats-only mode (in een eerdere sessie)
* Traject modus, waarin puntenwolken niet worden opgeslagen (vergelijkbaar met Area Learning)
* Post-processing opties (bijv., Gebruik Bundle Aanpassing aan textures uitlijnen)
* Toegevoegd "Instellingen-> Mapping-> Save GPS" optie (standaard uitgeschakeld) om op te slaan GPS coördinaten in de database. Zie kwestie # 226 op pagina project voor meer info.
Last updated on Nov 24, 2016
- Added "Mapping->Append Mode" option (default true): when resuming, a new map is created only after being localized with the old map.
- Updated with RTAB-Map 0.11.11 and Tango Yildun.
- In third-person view, we can now move virtually the camera with two fingers.
- Added Data Recorder Mode under Mapping options. This can be used to record Tango raw data at higher frame rate without actual mapping.
- Added smoothing mesh post-processing option
Laatste Versie
![]() 0.11.11
0.11.11
Geüpload door
Melissa Smith
Android vereist
Android 4.2+
Categorie
Melden


Discover what you want easier, faster and safer.

RTAB-Map
0.11.11 by Mathieu Labbé
Oct 24, 2018