از برنامه APKPure استفاده کنید
نسخه قدیمی APK RoboCam را برای اندروید بگیرید
از طریق RoboCam شما می توانید FPV ربات EV3، Android یا Raspberry Pi خود را کنترل کنید.
با استفاده از RoboCam می توانید FPV LEGO Mindstorms EV3، Android یا Raspberry Pi را کنترل کنید.
راهنمای شروع سریع (فقط برای کسانی که دارای یک کیت آموزشی از LEGO Mindstorms EV3 (45544)):
1. جمع آوری محقق EV3 (دستورالعمل: https://goo.gl/yPU4sa)، آن را روشن کنید و مطمئن شوید که بلوتوث کار می کند.
2. برنامه RoboCam را روی یک گوشی هوشمند نصب کنید (به ترتیب شماره تلفن 1).
3. بلوتوث تلفن 1 را روشن کنید و اطمینان حاصل کنید که تلفن 1 و EV3 از طریق بلوتوث متصل هستند (باید آنها را زوج).
4. تلفن 1 و تلفن هوشمند را که برای کنترل روبات (به ترتیب تلفن 2) به همان روتر Wi-Fi استفاده می کنید، استفاده کنید.
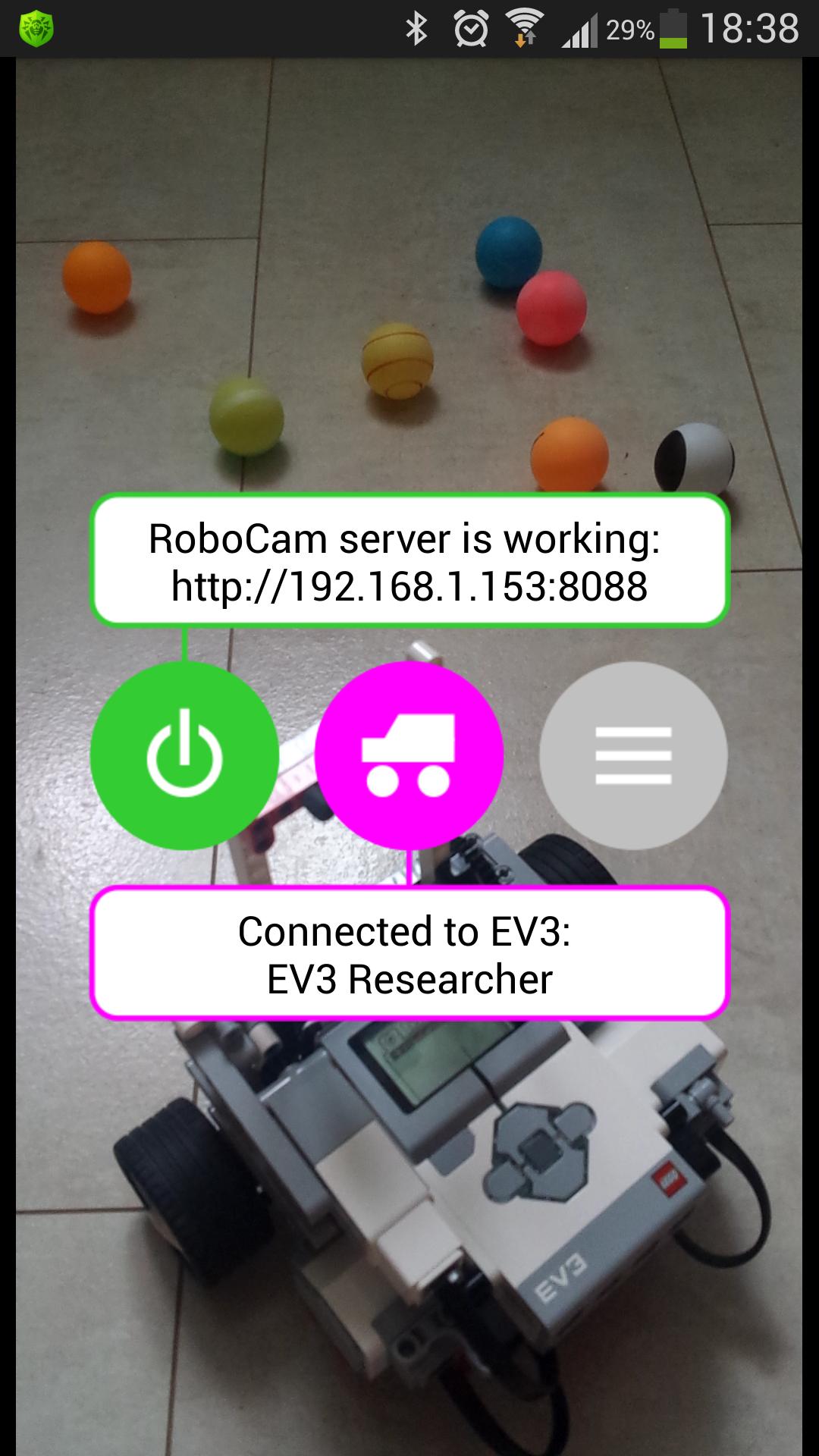
5. یک سرور RoboCam را راه اندازی کنید. برای این دکمه سبز چپ فشار دهید.
6. تلفن 1 را به ربات وصل کنید. برای این فشار دکمه قرمز در وسط.
7. باز کردن گوگل کروم در تلفن 2 و رفتن به لینک است که در برنامه RoboCam در تلفن 1 نشان داده شده است.
8. ورود به سیستم 2 تلفن (به طور پیش فرض استفاده از admin و 123).
9. بر روی تلفن 2 دو جوی استیک و ویدیو از دوربین تلفن 1 به نظر می رسد. تلفن را قفل کرده و آن را به ربات وصل کنید.
10. حالا شما می توانید ربات خود را از طریق تلفن 2 کنترل کنید.
اگر شما یک کیت خانگی از LEGO Mindstorms EV3 (31313) دارید یا میخواهید به جای EV3 رقیب EV3 ربات دیگری را کنترل کنید، باید برنامه RoboCam را راه اندازی کنید. به تنظیمات RoboCam مراجعه کنید.
برای استفاده از برنامه شما نیاز به دانستن دو چیز دارید: نحوه تنظیم اتصال و نحوه کنترل آن.
این راهنمای سریع در تنظیم اتصال استاندارد است. نیازمند: ربات EV3، Android-گوشی هوشمند با RoboCam نصب شده (به ترتیب تلفن 1) و گوشی هوشمند یا رایانه لوحی (Android، iOS یا ویندوز) با یک مرورگر مدرن که از HTML5 پشتیبانی می کند (در ادامه تلفن 2). تلفن 1 به وسیله بلوتوث به EV3 متصل است (دستگاه باید از قبل زوج شود!). پس از شروع سرور RoboCam در تلفن 1 و اتصال تلفن 1 و تلفن 2 به یک روتر WiFi، می توانید از طریق مرورگر (از تلفن 2) به سرور روبوک (به تلفن 1) متصل شوید. برای انجام این کار، باید آدرس را در قسمت آدرس مرورگر بنویسید که در RoboCam نشان داده شده است، به عنوان مثال، http://192.168.1.2:8088
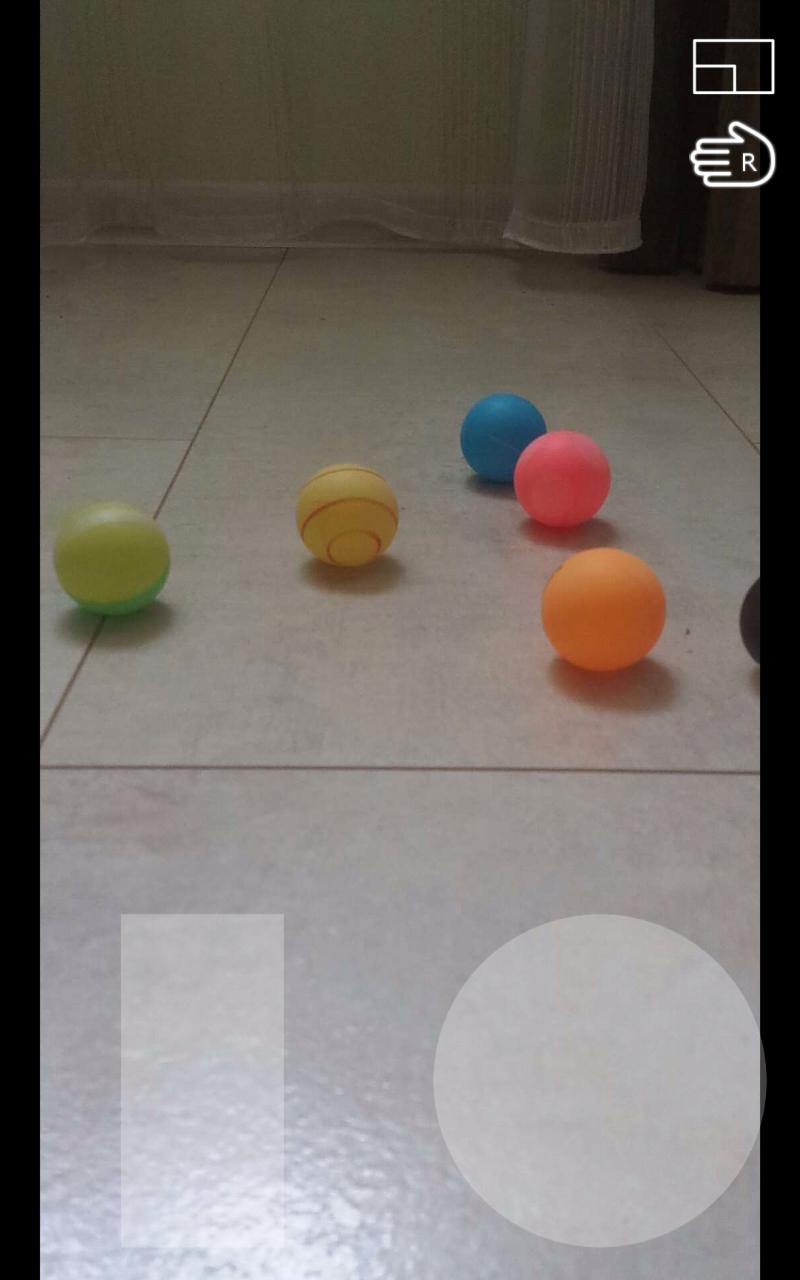
این شرح مختصری از نحوه کنترل است. پس از اتصال به سرور RoboCam از طريق مرورگر تلفن 2 و ورود به برنامه وب RoboCam، همه چيز را که دوربين تلفن 1 مي بينيد را مي بينيد. تلفن 1 را به ربات خود وصل کنید، بنابراین دوربین آن به جلو هدایت می شود. برنامه وب در تلفن 2 می تواند از 1 تا 4 یواس.تیک برای کنترل روبات بسته به تنظیمات داشته باشد. هنگامی که جوی استیک را لمس می کنید، مختصات نقاط لمس به برنامه RoboCam در تلفن 1 منتقل می شود و سپس بسته به تنظیمات جوی استیک آنها به دستورات موتور EV3 تبدیل می شوند یا به صندوق های پستی EV3 ارسال می شوند. اگر مختصات به صندوق های پستی ارسال شوند، شما باید یک برنامه EV3 اضافی را برای پردازش آنها بنویسید. نام صندوق های پستی عبارتند از: x و y - جوی استیک 1، w و z - جوی استیک 2، a و b - جوی استیک 3، c و d - جوی استیک 4.
به طور پیش فرض، برنامه دارای یک تنظیم برای تنها یکی از ربات است - "EV3 Researcher"، که شما می توانید در ویدیو ببینید. شما می توانید EV3 پژوهشگر را از یک مجموعه آموزشی LEGO Mindstorms EV3 (45544) جمع آوری کنید. مدارهای ساخت لینک محقق را دانلود کنید : https://goo.gl/yPU4sa
Last updated on 21/01/2018
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
آخرین نسخه
![]() 1.4.4
1.4.4
بارگذاری شده توسط
শাহাদাত হোসেন
نیاز به اندروید
Android 2.3.2+
دسته بندی
گزارش


بیشتر بیابید آنچه که می خواهید آسان تر، سریع تر و ایمن تر است.

RoboCam
1.4.4 by ProgHouse
21/01/2018